

Explicación consigna lograda: Se realizó el estudio de la teoría sobre excentricidad, .y el tema sobre "Estructuras de control con validación lógica", la cual no estaba explicada de forma clara, por lo tanto se recurren a otros medios investigativos para lograr la interiorización del tema en estudio
Se solicita la simulación de un mariposario el cual debe de contar con tres mecanismos que representan mariposas.
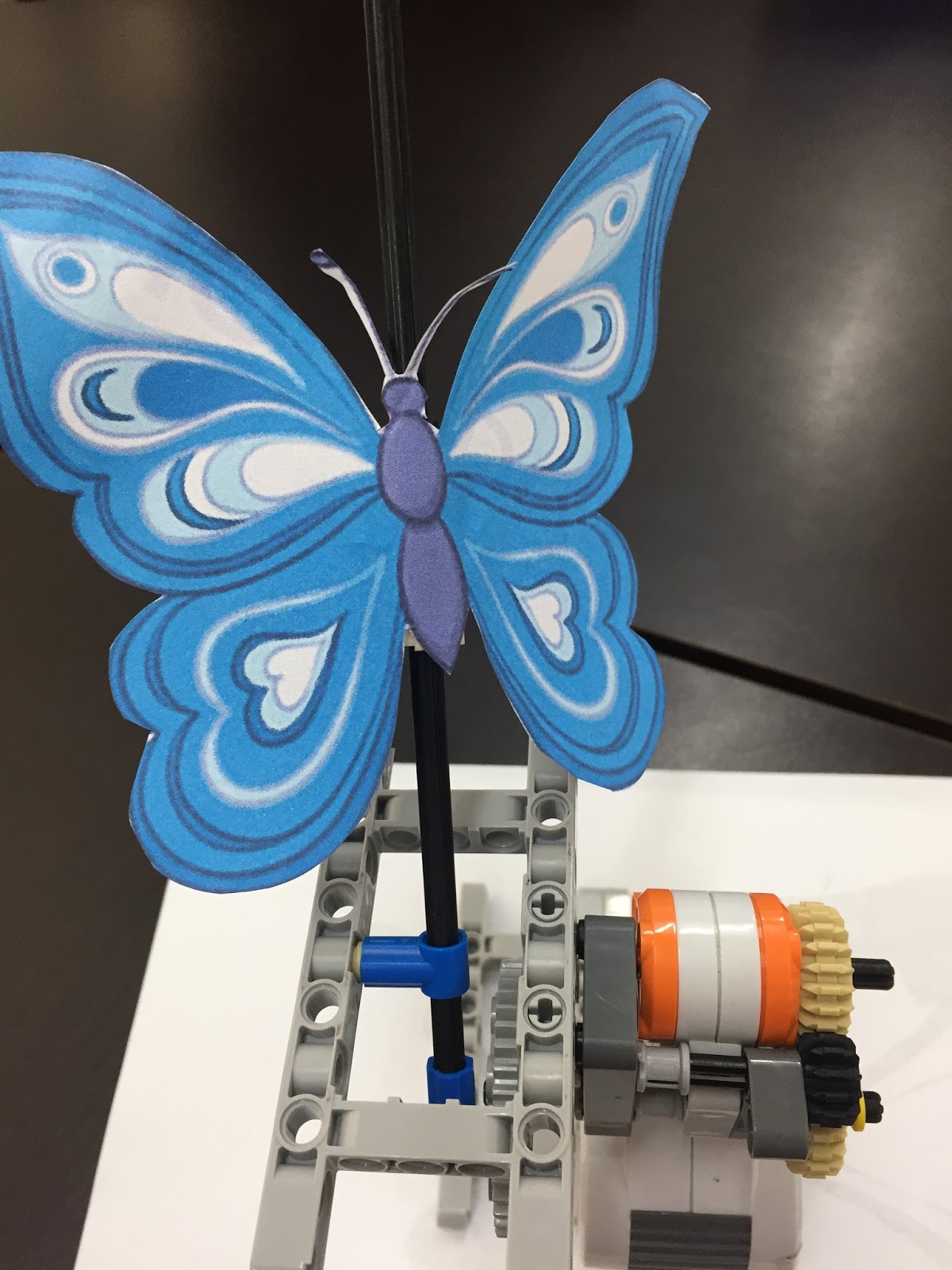
Mecanismo 1: mariposa construida con la excéntrica, movimiento giratorio que se convierte en lineal.
Mecanismo 2: mariposa con seguidor de leva.
Mecanismo 3: mariposa con excéntrica- biela- palanca.
Fotografías:
Mecanismo con excéntrica

Mecanismo Seguidor de leva
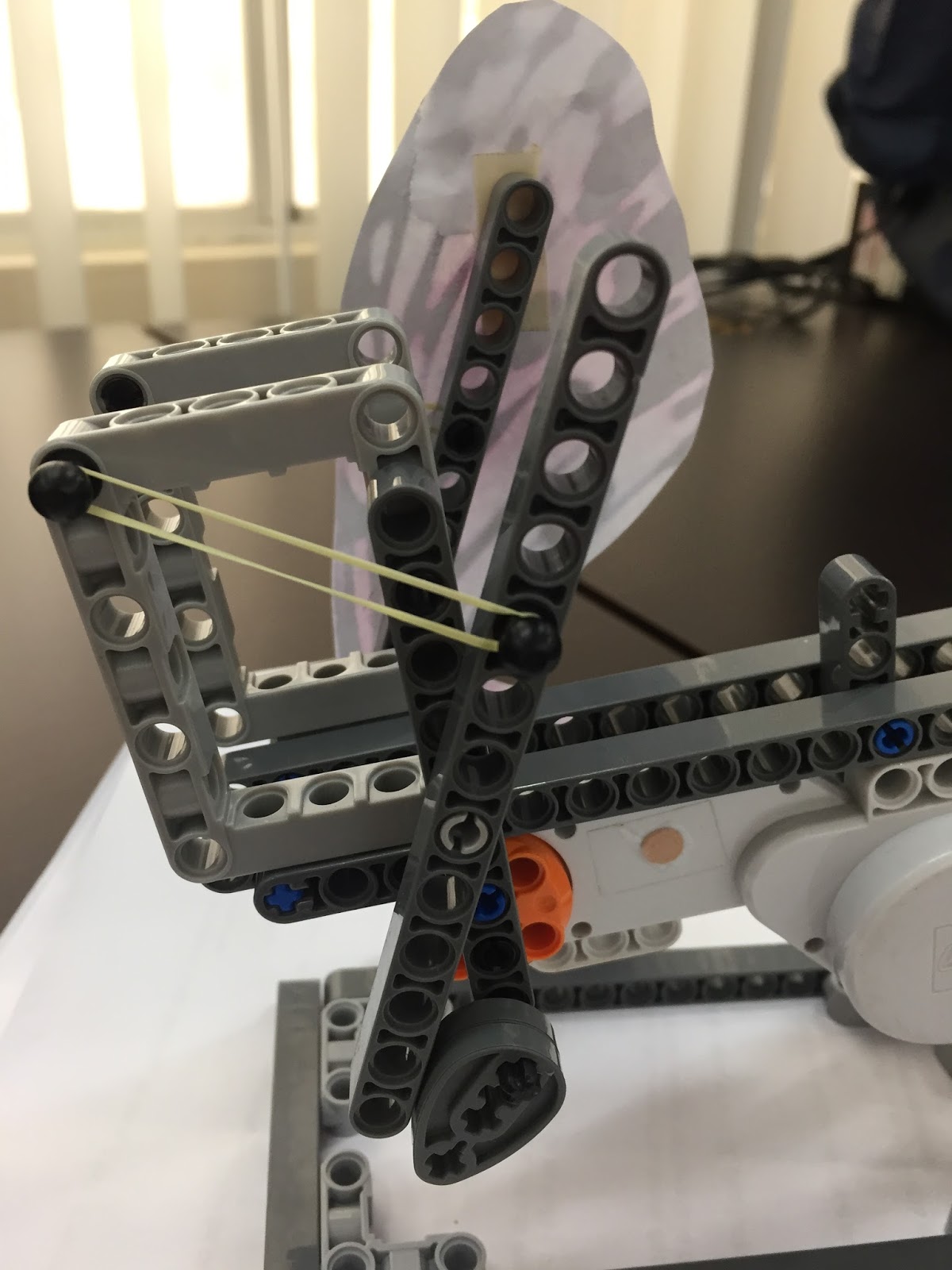

3- Mecanismo Excéntrica-biela-palanca


Programación: La programación se realiza por medio de los operadores lógicos y con multitareas.
Mariposa 1: La mariposa va mover sus alas, motor A hacia adelante, si se cumple un sonido O si algo se le acerca, se utilizan los sensores de sonido, ultrasónico y un motor conectado en el puerto A, y si no se cumplen las dos condiciones motor en A se detiene.













