Explicación de la consigna lograda:
La comunicación bluetooth es realizada por medio de tres mecanismos los cuales funcionan con excéntrica, palanca y neumática. El tema es la interacción entre el gato (esclavo 1), perro (esclavo 2) y ratón (máster).
El gato camina hacia adelante, y envía un mensaje al ratón que va ser atacado, el ratón retrocede y envía un mensaje al perro, el perro moverá su cabeza de un lado al otro para asustar al gato.
Mecanismos
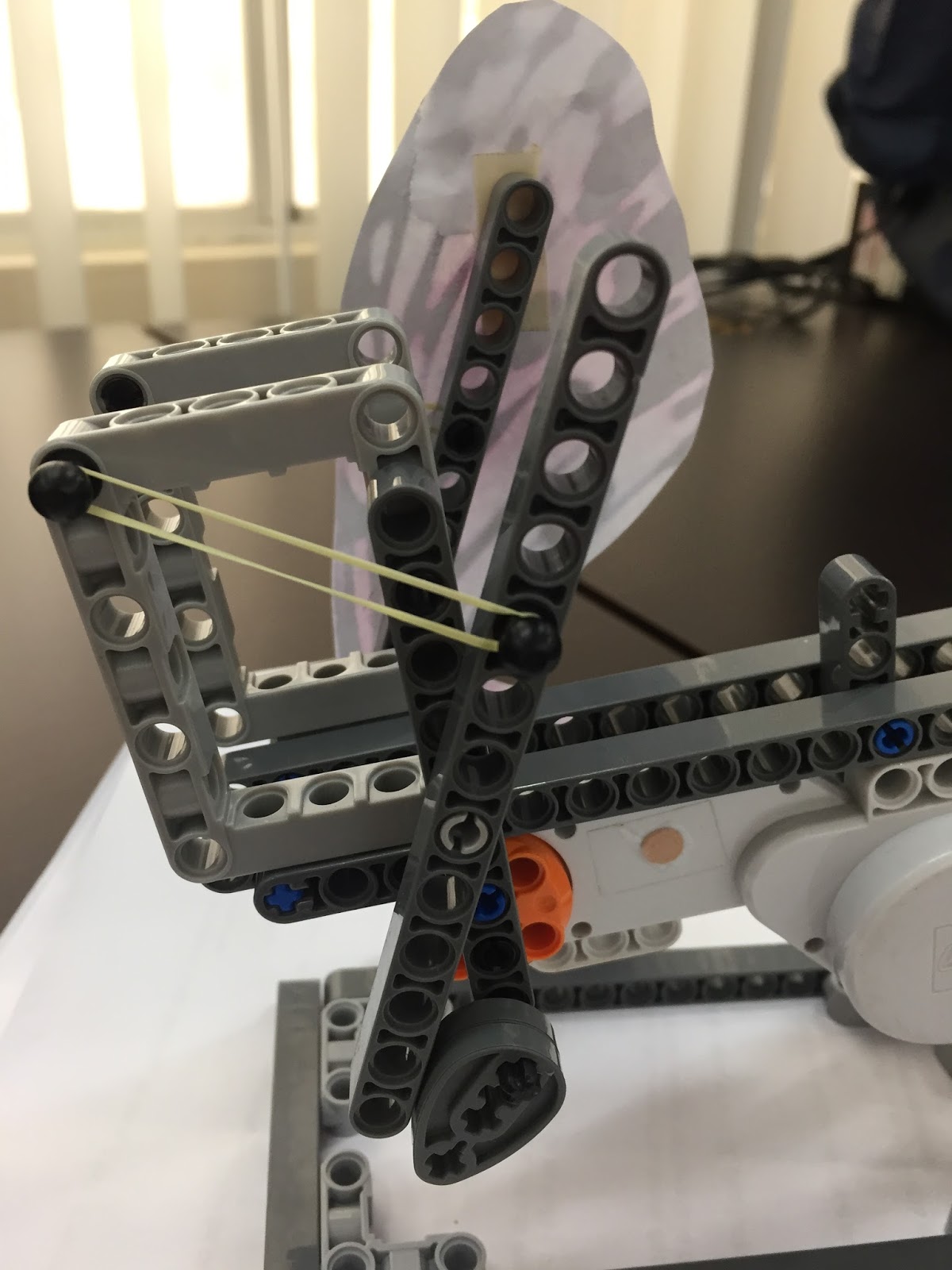
Gato, palanca, utiliza sensor ultrasónico para detectar al ratón y sensor de contacto para dar inicio a la comunicación.


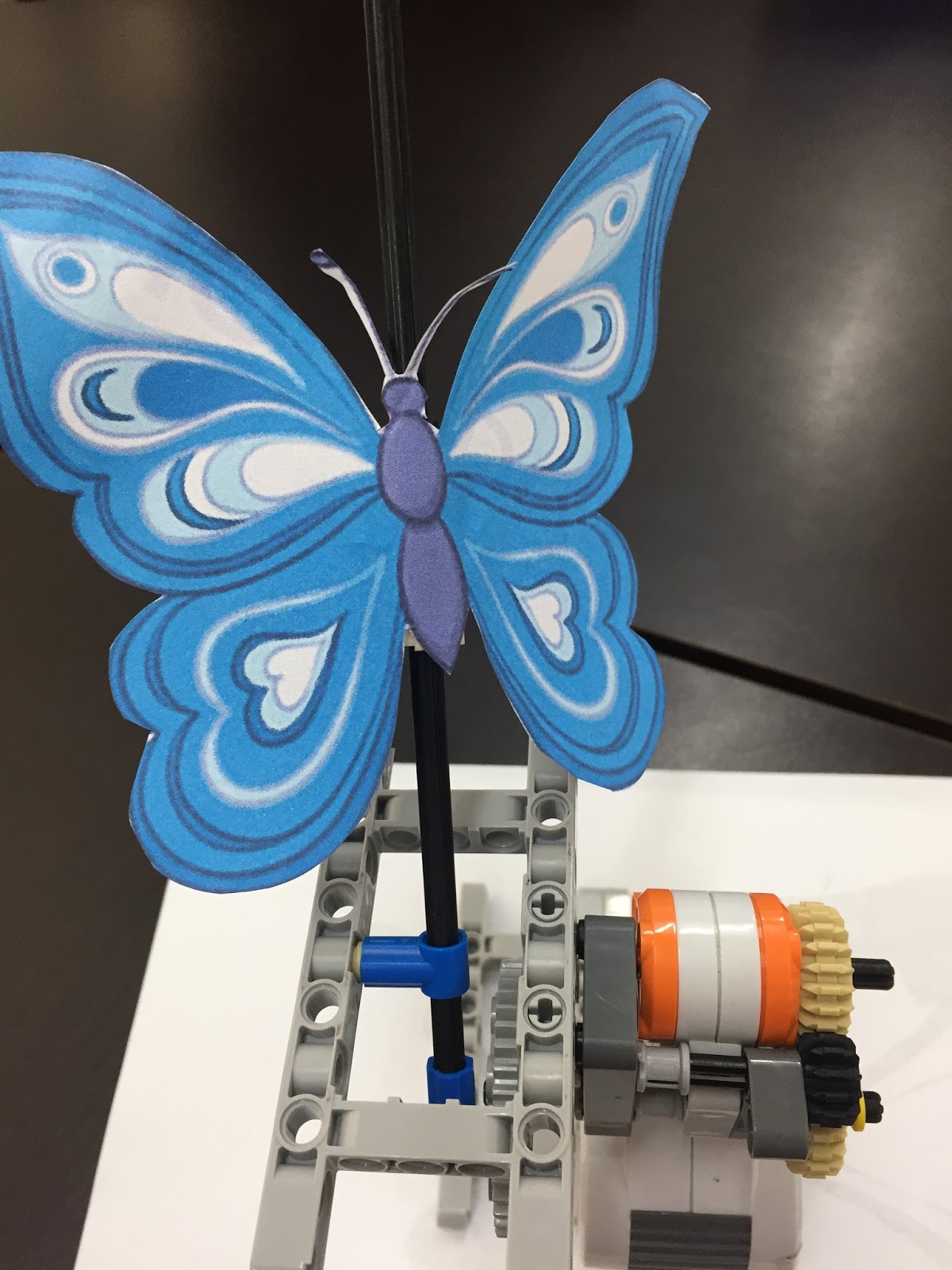
Ratón, con excéntrica, sensor ultrasónico para detectar al gato y sensor de sonido para que encienda una lámpara.


Perro, neumática, utiliza dos sensor en de sonido y de contacto para que prenda una luz al escuchar o ser acariciado.


Programación
Máster: Espera recibir el mensaje de gato, emite un sonido para confirmar el recibido del mensaje, luego regresa a un bloque infinito, donde con un O hace lectura de sonido o distancia con lo que enciende una lámpara que indica que está en alerta.

Bloque personalizado: En un bucle infinito hace lectura del sensor ultrasónico si se acerca el gato activa el motor en B, el ratón se mueve hacia atrás, espera un segundo envía un mensaje al perro (esclavo 2) el sonido indica al programador el fin del ciclo y confirma el envío del mensaje.


Al esperar por el sensor ultrasónico espera 1 segundo envía el mensaje al perro y emite un sonido.
Envía un mensaje y emite un sonido.
Espera por un sonido O por un acercamiento y enciende una lámpara ubicada en puerto C.
Esclavo 1

Al presionar el sensor de contacto el gato se moverá hacia adelante y al detectar con el sensor ultrasónico al ratón se detendrá, a la vez envía un mensaje al máster.
Con la lectura de sensor de ultrasónico el motor que se encuentra en C, se moverá hacia adelante simulando la pata del gato, si no realiza la lectura en motor en C se detendrá.
Esclavo 2

Recibe el mensaje del máster mueve su motor en A hacia adelante emite un sonido mueve su motor hacia atrás emite un sonido en un bucle condicionado por tres repeticiones.
La lectura la realiza con un O inclusivo, si escucha un sonido o es presionado enciende una luz.